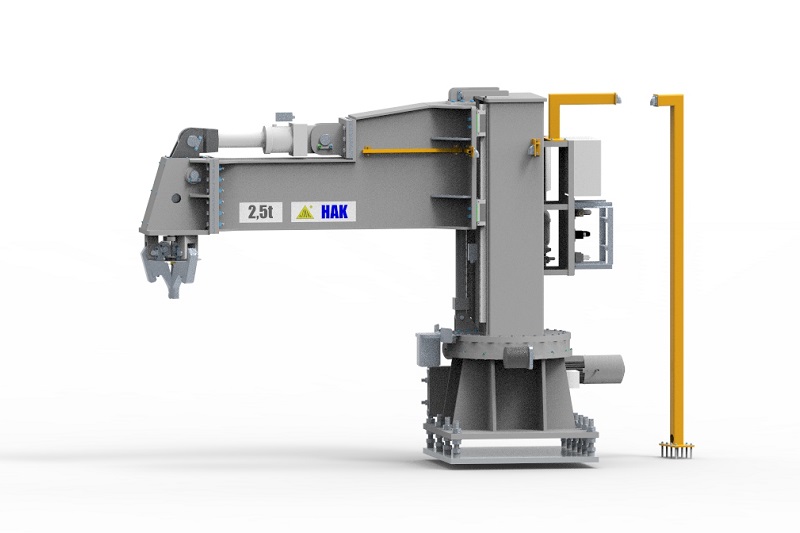
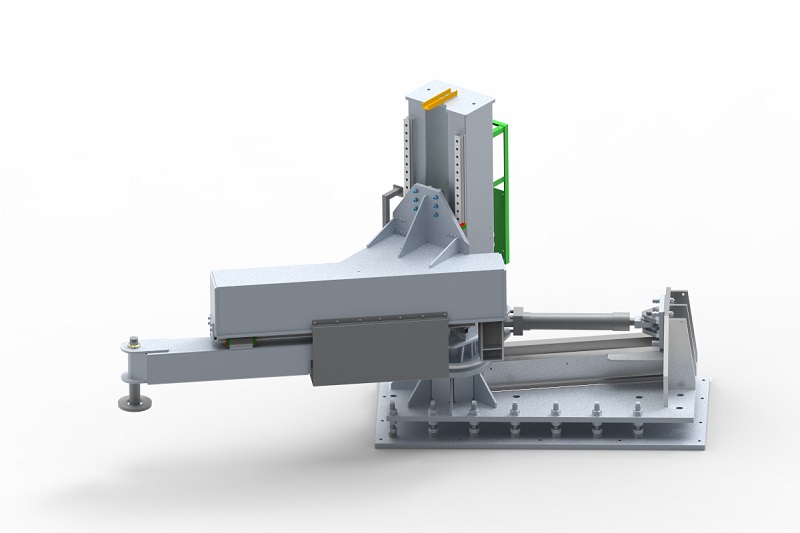
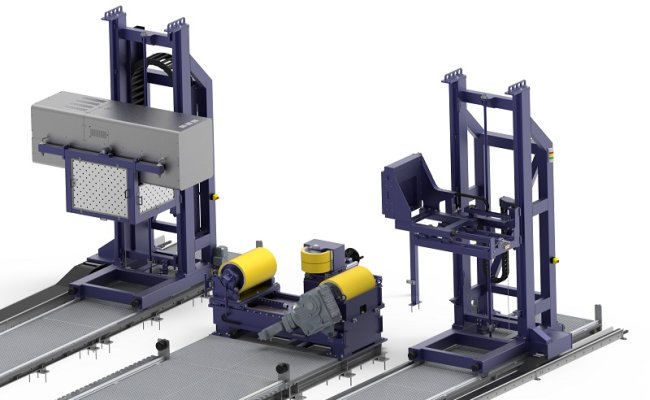
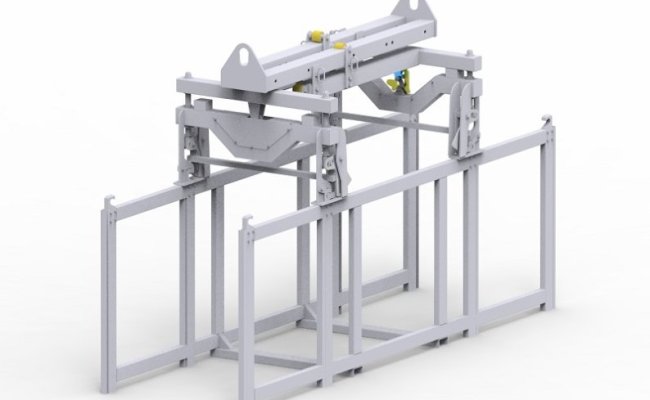
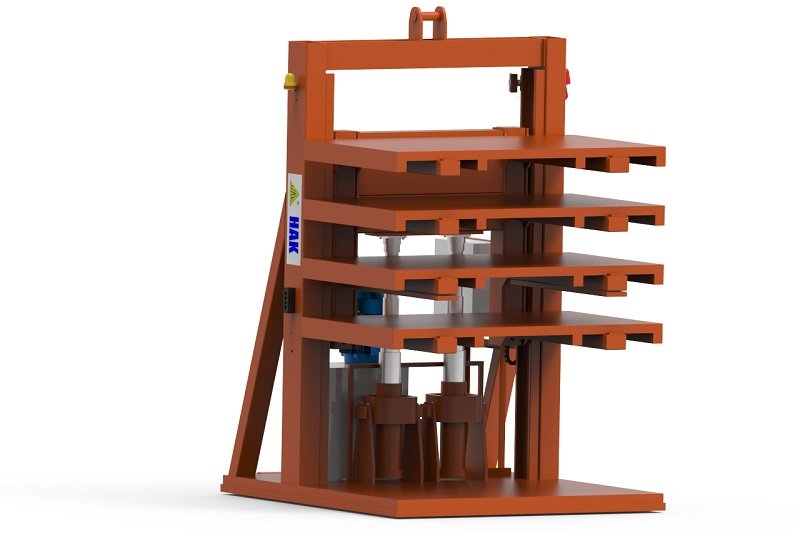
System manipulatorów trzpieniowych
System manipulatorów został zaprojektowany oraz wykonany do obsługi procesu transportu elementów stalowych poddawanych obróbce hutniczej. Płynna regulacja pracy manipulatorów umożliwia prowadzenie ładunku w linii o zmiennej trajektorii.
Proces przemieszczania elementów stalowych podczas obróbki z zastosowaniem wysokiej temperatury wymaga zastosowania specjalistycznych rozwiązań, dopasowanych zarówno do parametrów ładunku, jak i warunków otoczenia, w jakim wykonywane są czynności transportowe. Szczególnego traktowania wymagają środowiska hutnicze - przykładem są dwa manipulatory trzpieniowe, zaprojektowane do przemieszczania obrabianych elementów w postaci pierścieni i odkuwek.